
3.2. Инфракрасный дальномер — Цель обнаружена
На протяжении тысячелетий люди усовершенствовали орудия труда, изучали силы природы и подчиняли их себе, использовали их энергию для работы машин, а в прошлом веке создали машины, которые могут управлять другими машинами. Теперь создание устройств, которые взаимодействуют с физическим миром, доступно даже школьнику. Наш курс состоит из серии практических задач про создание вещей, которые работают сами: изучают мир, принимают решения и действуют – двигаются, обмениваются данными друг с другом и с человеком, управляют другими устройствами. Мы покажем, как собирать эти устройства и программировать их, используя в качестве основы платформу Arduino. Пройдя этот курс, вы сможете создавать устройства, которые считывают данные о внешнем мире с разнообразных датчиков, обрабатывают информацию, получают и отправляют данные на ПК, в Интернет, на мобильные устройства, управляют индикацией и движением. Создание устройств будет включать проектирование, изучение компонентов, сборку схем, написание программ, диагностику.
Инфракрасный дальномер GP2Y0A02YK0F | 2 Схемы
Самым распространенным датчиком для измерения расстояния в диапазоне от десятков сантиметров до единиц метров для Arduino проектов является ультразвуковой локатор HC-SR04. Однако, этот вариант не является единственным. Альтернативой ультразвуковому локатору может служить инфракрасный дальномер SHARP GP2Y0A02YK0F. Данный локатор может измерять расстояние в диапазоне от 20 до 150 см. В частности примеры работы с подобными устройствами можно найти в классической книге [1] или в [2-3]. Данное устройство приобретено на aliexpress.ru всего за 4 доллара.
Однако, этот вариант не является единственным. Альтернативой ультразвуковому локатору может служить инфракрасный дальномер SHARP GP2Y0A02YK0F. Данный локатор может измерять расстояние в диапазоне от 20 до 150 см. В частности примеры работы с подобными устройствами можно найти в классической книге [1] или в [2-3]. Данное устройство приобретено на aliexpress.ru всего за 4 доллара.
Датчик поставляется в антистатическом пакете
Датчик имеет пластмассовый корпус с габаритами 45 х 22 х 18 мм, масса 5 г без кабеля.
На корпусе имеются два крепежных отверстия, диаметром 3 мм с межцентровым расстоянием 37 мм.
Вместе с датчиком поставляют соединительный кабель длиной 190 мм.
- В кабеле красный провод – питание 5 В,
- черный – общий,
- желтый – сигнальный.
Ток, потребляемый устройством 33 мА [4-5], согласно измерениям автора обзора, ток потребления составил 26 мА.
Дальномер имеет нелинейную зависимость между измеренным расстоянием и напряжением на информационном выходе. График зависимости напряжения на информационном выходе (желтый провод) от расстояния, согласно данным производителя.
График зависимости напряжения на информационном выходе (желтый провод) от расстояния, согласно данным производителя.
Как видно, напряжение питания и диапазон изменения напряжения на информационном выходе позволяют без проблем подключить данное устройство к Arduino. Для работы с этим дальномером энтузиастами уже написаны демонстрационные программы, например [4]. Данная программа рассчитывает расстояние до препятствия в сантиметрах и передает результаты расчета по последовательному порту.
В целом первое впечатление о данном датчике положительное, в рамках заявленного диапазона расстояний датчик работает, на яркие источники света (светодиодная лампа) аномальной реакции замечено не было. К недостаткам, по сравнению с ультразвуковым локатором HC-SR04, можно отнести более высокую стоимость и меньшую дальность. Так что если радиолюбителя по какой-то причине не устраивает ультразвуковой дальномер вроде HC-SR04, то датчик SHARP GP2Y0A02YK0F может стать альтернативой.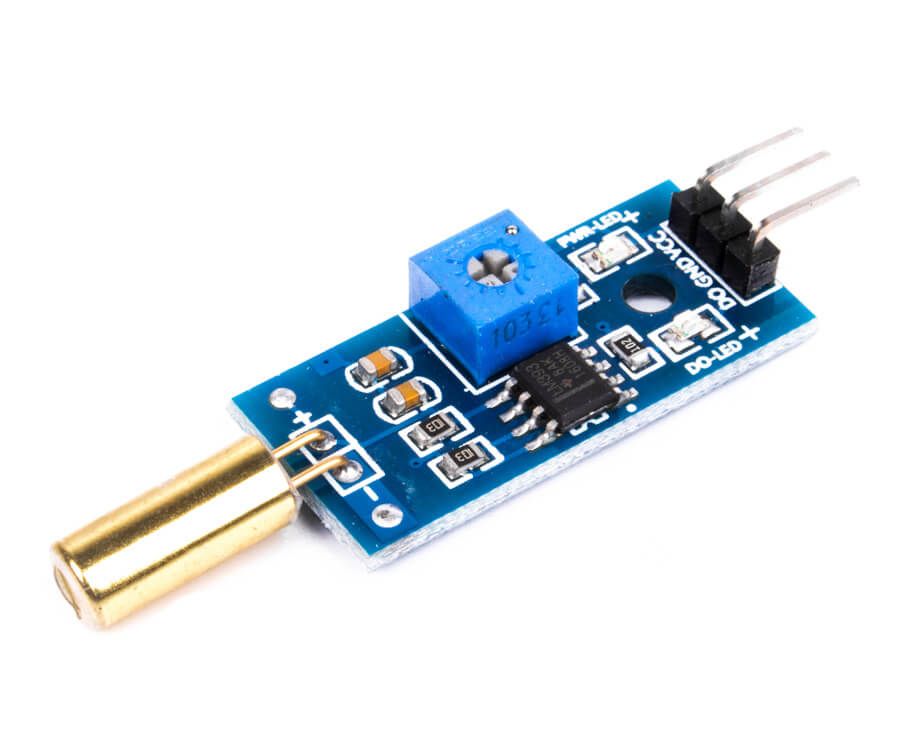
Литература и ссылки
- Блум Д. Изучаем Arduino: инструменты и методы технического волшебства: Пер. с англ. — СПб.: БХВ-Петербург, 2015. — 336 с.
- robocraft.ru/blog/electronics/748.html
- mysku.ru/blog/aliexpress/29357.html
- robocraft.ru/blog/electronics/783.html
- zelectro.cc/SHARP_GP2Y0A02YK0F
Прошивку и даташит на датчик скачайте в архиве. Специально для сайта 2Схемы — Denev.
Arduino IR distanse meter инфракрасный дальномер — Все остальное
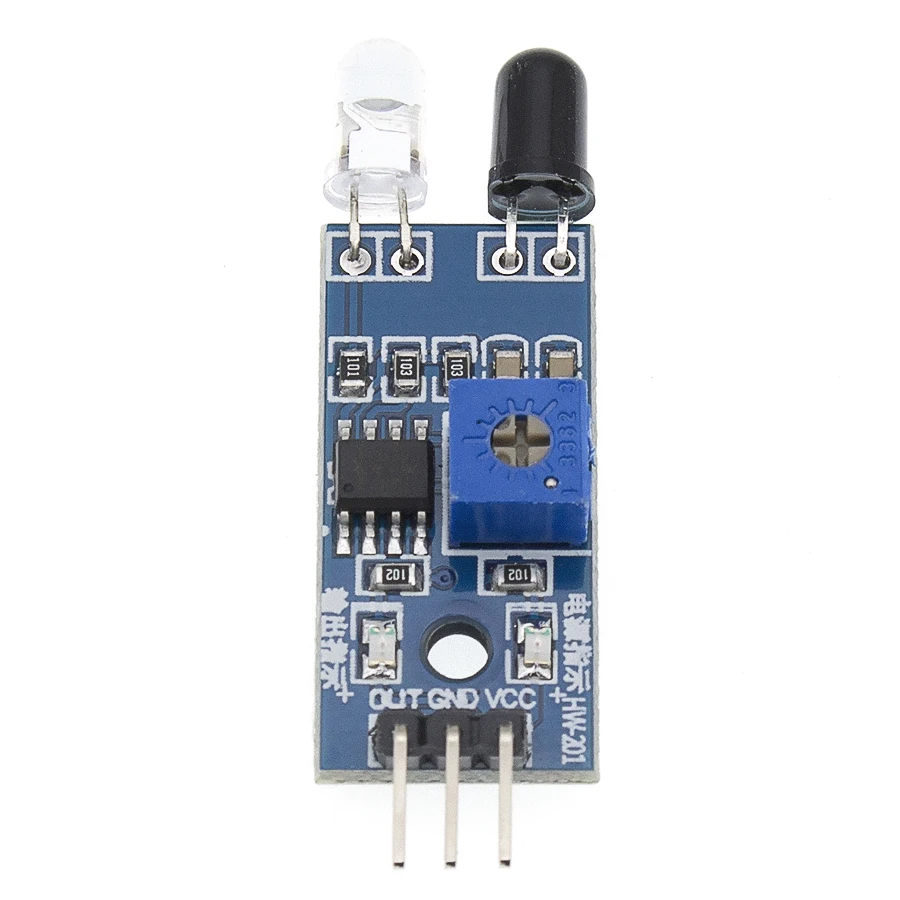
Инфракрасный датчик препятствий применяется часто в робототехнике (для обхода препятствий) Принцип работы инфракрасного датчика препятствий основан на измерении интенсивности замера отражения инфракрасным приемником лучей излучаемых ИК передатчиком. Далее компаратор на плате сравнивает полученный сигнал со значением выставленным на потенциометре (он есть на плате), если больше, то выдает на выходи логическую единицу, меньше, то ноль.Инфракрасный датчик препятствий имеет 3 выхода.
 Обозначение контактов: VCC (напряжение питания), OUT (выходной цифровой сигнал), GND (общий контакт)
Обозначение контактов: VCC (напряжение питания), OUT (выходной цифровой сигнал), GND (общий контакт)Напряжение питания датчика 3,3 – 5 В.
Для начала необходимо подключить 5-3.3в к входу vcc и землю. Загорится красный. Далее перед датчиком поставить препятствие на необходимом расстоянии для срабатывания датчика и отрегулировать потенциометром необходимый уровень. При срабатывании на модуле загорится зеленый светодиод.
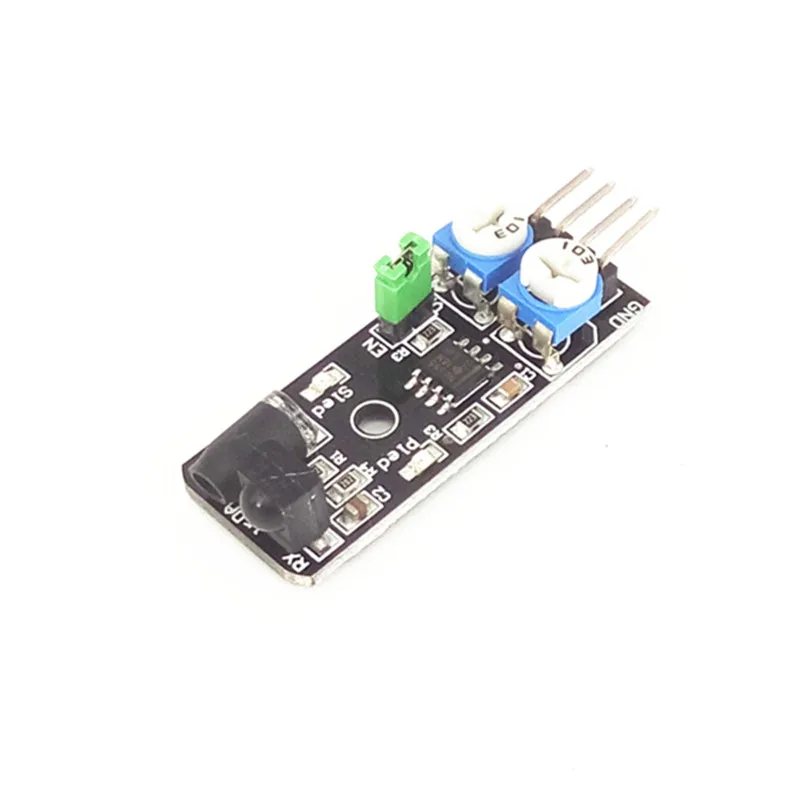
Модель: YL-63;
компаратор основан на микросхеме: LM393;
тип датчика: Диффузионный;
расстояние действия излучателя: 2 – 30 см (регулируется потенциометром) ;
угол обнаружения объектов: 35°;
потенциометр для изменения чувствительности;
световая индикация питания;
световая индикация срабатывания;
размеры (Д х Ш х В) : 43 х 16 х 7 мм;
Соединение модуля и Arduino
Arduino IR Sensor
+ 3.3V-5М VCC
GND GND
D7 OUT
Հարգելի գնորդներ, 10.000 դրամ և ավելի գնումներ կատարելու դեպքում` Երևանի տարածքում և շրջակա բնակավայրերում առաքումը կկատարվի անվճար: Մինչև 10.
 000 դրամ արժողությոմբ գնումները կառաքվեն 500 դրամով: Մարզերում հնարավոր է փոստային առաքում:
000 դրամ արժողությոմբ գնումները կառաքվեն 500 դրամով: Մարզերում հնարավոր է փոստային առաքում:Ցանկացած ապրանքի վերաբերյալ կարող եք ստանալ անվճար խորհարդատվություն (Խորհրդատվություն ստանալու համար ապրանքը գնելը պարտադիր չէ) :
Arduino Iot avtomat automat avtomatika wifi ESP BLE Bluetooth smart home sensor hardware/software development internet of things USB I2C SPI TTL
Առդուինո ավտոմատ էլեկտրոնիկա ծրագրավորում սմարթ արդուինո
Ардуино автоматика смарт дом управление электроника программирование схемотехника искусственный интеллект дистанционное управление датчик разработка
Ультразвуковые датчики | Академия робототехники
Что бы робот мог объезжать препятствия, ему нужно их видеть. Для того что бы робот стал зрячим обычно используют ультразвуковой датчик измерения расстояния. Дальность действия датчика — 180 см.
Эйдзи Накано — Введение в робототехнику. Глава V. Сенсорные устройства роботов. Ультразвуковые датчики
Пьезоэлектрический эффект
 youtube.com/embed/47W8drfXVGE?rel=0″ frameborder=»0″ allowfullscreen=»allowfullscreen»/>
youtube.com/embed/47W8drfXVGE?rel=0″ frameborder=»0″ allowfullscreen=»allowfullscreen»/>
Принцип действия
Ультразвуковой дальномер определяет расстояние до объектов точно так же, как это делают дельфины или летучие мыши. Он генерирует звуковые импульсы на частоте 40 кГц и слушает эхо. По времени распространения звуковой волны туда и обратно можно однозначно определить расстояние до объекта.
В отличие от инфракрасных дальномеров, на показания ультразвукового дальномера не влияют засветки от солнца или цвет объекта. Но могут возникнуть трудности с определением расстояния до пушистых или очень тонких предметов. Поэтому высокотехнологичную мышеловку выполнить на нём будет затруднительно.
При отражении звука от препятствия мы слышим эхо. Летучая мышь использует отражение ультразвуковых волн для полётов в темноте и для охоты на насекомых. По такому же принципу работает эхолот, с помощью которого измеряется глубина воды под днищем корабля или поиск рыбы.
По такому же принципу работает эхолот, с помощью которого измеряется глубина воды под днищем корабля или поиск рыбы.
Принцип передачи и приема ультразвуковой энергии лежит в основе многих очень популярных ультразвуковых датчиков и детекторов скорости. Ультразвуковые волны являются механическими акустическими волнами, частота которых лежит за пределами слышимости человеческого уха — более 20 кГц. Однако сигналы этих частот воспринимаются некоторыми животными: собаками, кошками, грызунами и насекомыми. А некоторые виды млекопитающих, таких как летучие мыши и дельфины, общаются друг с другом ультразвуковыми сигналами.
УЛЬТРАЗВУКОВОЙ ДАТЧИК Lego Mindstorm EV 3. ЗРИ В КОРЕНЬ
Технические спецификации и особенности продукта:
- Измерение расстояния в диапазоне от 1 до 250 см
- Точность измерения до +/- 1 см
- Передняя подсветка в виде красного кольца горит постоянно при передаче сигнала и мигает при прослушивании эфира
- Если ультразвуковой сигнал распознан, датчик возвращает логическое значение «Истина»
- Автоматическая идентификация производится программным обеспечением микрокомпьютера EV3
Рис.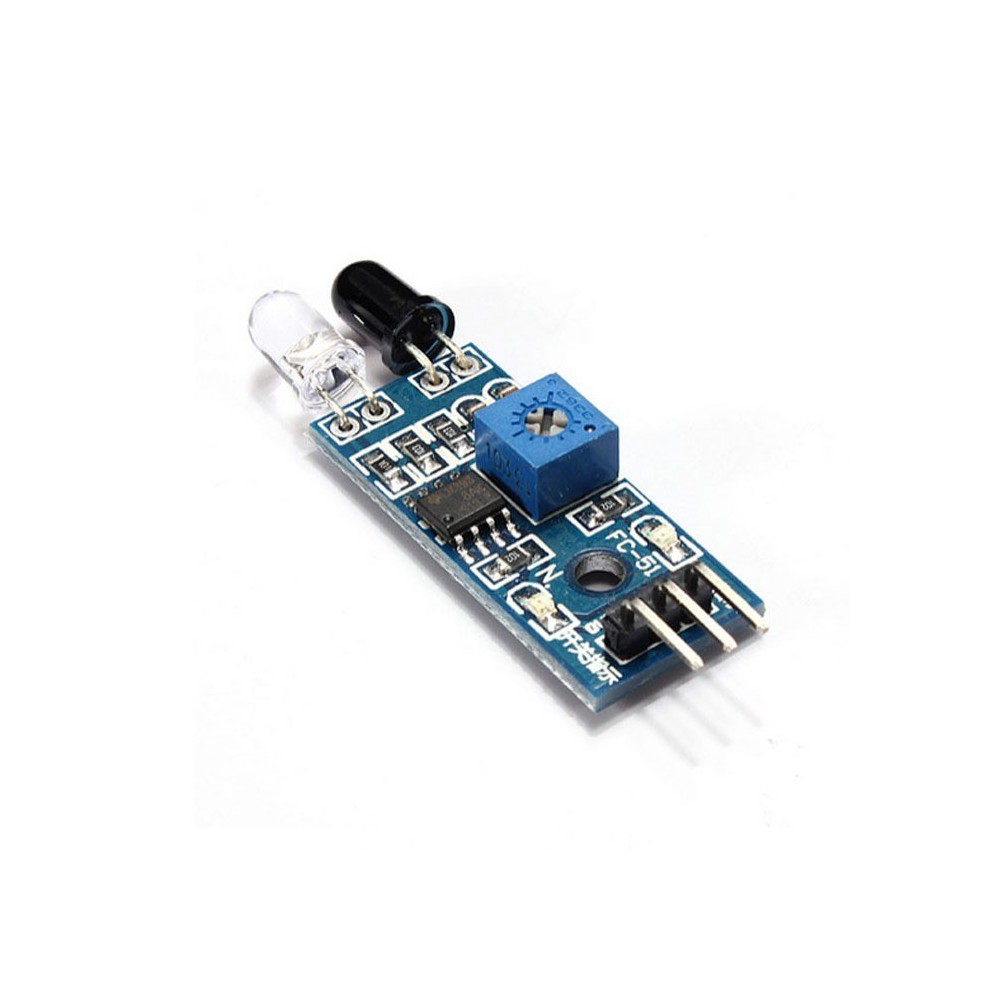 1 Ультразвуковой датчик Lego Mindstorm EV 3 (стоимость вместе с внутренним микроконтроллером и микросхемами усиления сигнала $50, при себестоимости $5)
1 Ультразвуковой датчик Lego Mindstorm EV 3 (стоимость вместе с внутренним микроконтроллером и микросхемами усиления сигнала $50, при себестоимости $5)
Рис. 2 Схема ультразвукового датчика Lego Mindstorm EV 3 (ultrasonic sensor hardware schematics) построена на микроконтроллере STM8S103F3
Рис. 3 Ультразвуковые излучатель AW8T40 и приемник AW8R40 ультразвукового датчика Lego Mindstorm EV 3
Ультразвуковой датчик HC-SR04
Ультразвуковой датчик HC-SR04 — Ultrasonic Ranging Module HC — SR04 — Ultrasonic Sensor Distance Measuring Module — Sonar
Ультразвуковой дальномер HC SR04 самый известный датчик для применения в Arduino, Raspberry Pi, ESP8266 и ESP32 модулях. Позволяет измерять расстояние до объекта в диапазоне от 2 до 400 (180) см. Например, если вы хотите собрать робота, который объезжает преграды, то данный дальномер прекрасно подойдет для ваших задач.
Рис. 4 Внешний вид ультразвукового датчика (сонара, ультразвукового сенсора, ультразвукового модуля) HC-SR04
Названия выводов и ультразвуковых излучателей модуля
- Vcc — положительный контакт питания.
- Trig — цифровой вход. Для запуска измерения необходимо подать на этот вход импульс (логическую единицу) длительностью 10 мкс. Следующий импульс рекомендуется подавать не ранее чем через 50 мс. что связано со временем обработки первого импульса.
- Echo — цифровой выход. После обработки отраженного сигнала, на этот выход будет подан импульс (логическая единица), длительностью пропорциональной расстоянию до объекта.
- GND — отрицательный контакт питания (земля).
- Левый ультразвуковой излучатель (маркирован буквой Т — transmiter) это передатчик ультразвукового сигнала, правый ультразвуковой излучатель (маркирован буквой R — resiver) это приемник отраженного от объекта ультразвукового сигнала (эха).

Характеристики
- Напряжение питания: 5 В. Модель HC-SR04 + работает в диапазоне от 3,3В-5В (помечено как HC-SR04 + на задней стороне платы модуля)
- Потребление в режиме тишины: 2 мА
- Потребление при работе: 15 мА
- Максимальная частота опроса датчика: 20 Гц (Период опроса 50 мс)
- Частота ультразвука: 40 кГц
- Дальность обзора: 2 см – 4 м (1,8 м)
- Разрешение (градация выходного сигнала): 0,3 см
- Эффективный угол наблюдения: 15°
- Рабочий угол наблюдения: 30°
- вес — 8,28 грамм
- Размеры: 45*20*15 мм. ДхШхГ (Ш — без учета контактов подключения)
Рис. 5 Размеры ультразвукового датчика HC-SR04
- Внимание:
- ! При испытании модуля на дальность и точность измерения, размер площади объекта сканирования должен не менее 0,5 квадратных метров и его поверхность должна быть как можно тверже и ровнее, в противном случае, это будет влиять на результаты измерений.

Рис. 6 Диаграмма направленности ультразвукового датчика HC-SR04. Взята из документации на этот датчик
Описание работы:
Тест угла обзора датчика, взят из описания с сайта www.iteadstudio.com
Ультразвуковой датчик расстояния определяет расстояние до объекта, измеряя время отображения звуковой волны от объекта. Частота звуковой волны находится в пределах частоты ультразвука, что обеспечивает концентрированное направление звуковой волны, так как звук с высокой частотой рассеивается в окружающей среде меньше. Типичный ультразвуковой датчик расстояния состоит из двух мембран, одна из которых генерирует звук, а другая регистрирует отображенное эхо. Образно говоря, мы имеем дело со звуковой колонкой и микрофоном. Звуковой генератор создает маленький, с некоторым периодом ультразвуковой импульс и запускает таймер. Рисунок 3 – Ультразвуковой датчик расстояния HC-SR04 Вторая мембрана регистрирует прибытие отображенного импульса и останавливает таймер. От времени таймера по скорости звука возможно вычислить пройденное расстояние звуковой волны. Расстояние объекта приблизительно половина пройденного пути звуковой волны. Рисунок 4 –Принцип работы ультразвукового датчик расстояния Ограничения, связанные с применением ультразвукового датчик расстояния : 1. Частичные отражения, или как их называют паразитный эхо-сигнал, могут исказить результаты измерений (причиной могут стать криволинейные или наклонные по отношению к направлению излучения сигнала поверхности). 2. Измерения объектов из звукопоглощающих, изоляционных материалов или имеющих тканевую (шерстяную) поверхность могут привести к неправильным измерениям вследствие поглощения (ослабления) сигнала. 3. Чем меньше объект, тем меньшую отражающую поверхность он имеет.
Звуковой генератор создает маленький, с некоторым периодом ультразвуковой импульс и запускает таймер. Рисунок 3 – Ультразвуковой датчик расстояния HC-SR04 Вторая мембрана регистрирует прибытие отображенного импульса и останавливает таймер. От времени таймера по скорости звука возможно вычислить пройденное расстояние звуковой волны. Расстояние объекта приблизительно половина пройденного пути звуковой волны. Рисунок 4 –Принцип работы ультразвукового датчик расстояния Ограничения, связанные с применением ультразвукового датчик расстояния : 1. Частичные отражения, или как их называют паразитный эхо-сигнал, могут исказить результаты измерений (причиной могут стать криволинейные или наклонные по отношению к направлению излучения сигнала поверхности). 2. Измерения объектов из звукопоглощающих, изоляционных материалов или имеющих тканевую (шерстяную) поверхность могут привести к неправильным измерениям вследствие поглощения (ослабления) сигнала. 3. Чем меньше объект, тем меньшую отражающую поверхность он имеет. Это приводит к более слабому отраженному сигналу. 4. При высокой влажности (дождь, снег) сигнал также может частично отражаться от капель (снежинок), что приводит к паразитному эхо- сигналу.
Это приводит к более слабому отраженному сигналу. 4. При высокой влажности (дождь, снег) сигнал также может частично отражаться от капель (снежинок), что приводит к паразитному эхо- сигналу.
Принцип работы датчика следующий: один из пьезоэлементов излучает ультразвуковую волну при подачи импульса длительностью 15 микросекунд, а другой пьезоэлемент принимает эту же отражённую волну от препятствия. Затем замеряется время задержки от передачи до приёма волны, далее вычисляется расстояние и передаётся сигнал на ногу Echo датчика, длительностью пропорциональной расстоянию до препятствия. Нам остаётся только подавать импульс на датчик, принять его и вычислить расстояние. Сегодня мы научимся работать с HC-SR04 на BASCOM-AVR.
Поставим перед собой задачу: собрать устройство, которое должно замерять расстояние до какого либо объекта с помощью датчика HC-SR04 и передавать данные через UART на ПК.
Для этой цели можно использовать практически любой AVR микроконтроллер, так как алгоритм очень простой.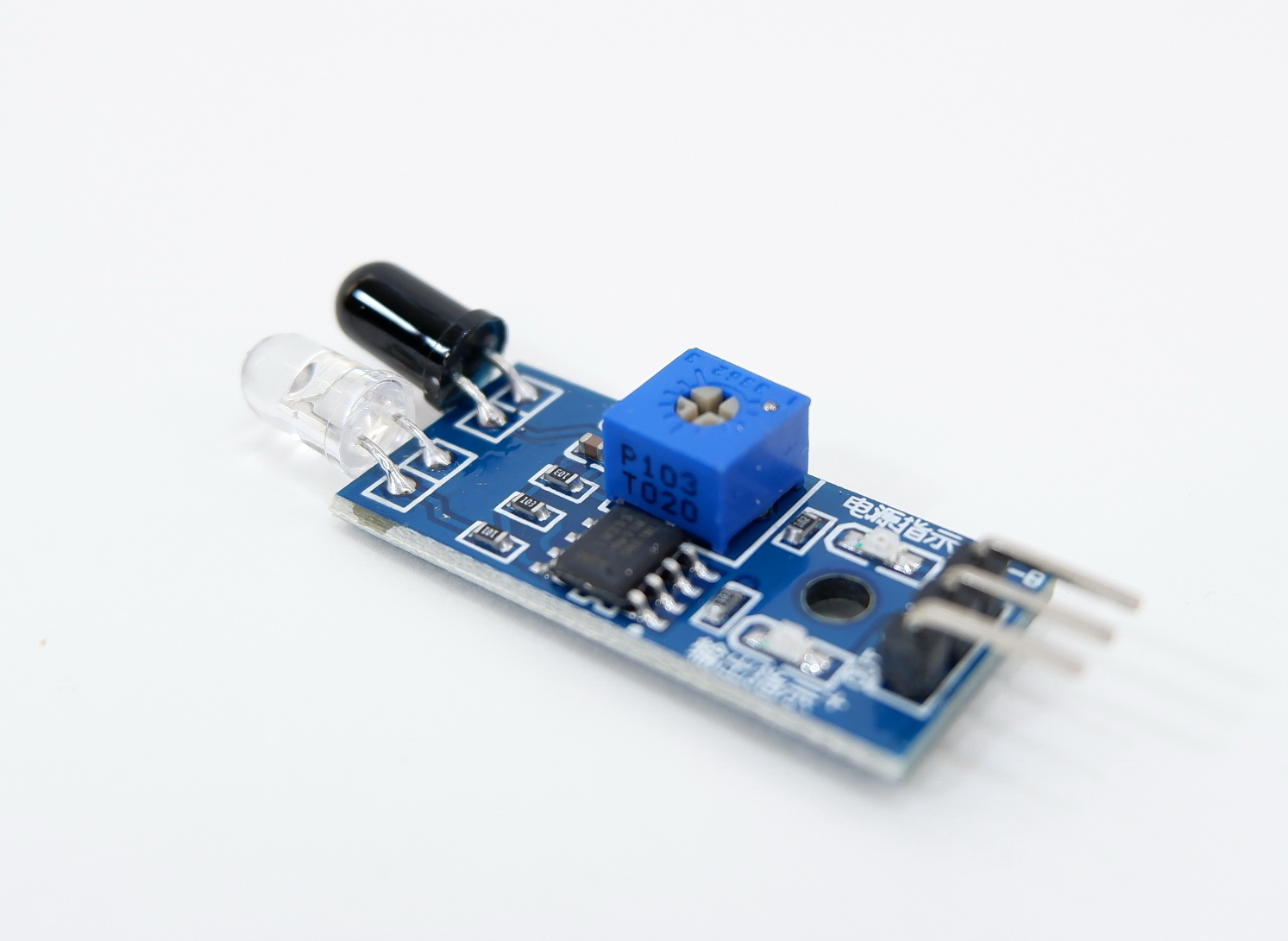 Я взял Atmega8, в итоге получилась следующая принципиальная схема устройства:
Я взял Atmega8, в итоге получилась следующая принципиальная схема устройства:
Описание принципа работы ультразвукового дальномера HC—SR04 можно разделить на следующие шаги:
Следующий импульс может быть излучён, только после исчезновения эха от предыдущего. Это время называется периодом цикла (cycle period). Рекомендованный период между импульсами должен быть не менее 50 мс.
Если на сигнальный пин (Trig) подаётся импульс длительностью 10 мкс, то ультразвуковой модуль будет излучать восемь пачек ультразвукового сигнала с частотой 40кГц и обнаруживать их эхо. Измеренное расстояние до объекта пропорционально ширине эха (Echo) и может быть рассчитано по формуле, приведённой на графике выше.
Датчик отправляет ультразвуковые импульсы и слушает эхо. На вход Trig датчика подаем импульс высокого уровня длительностью 10–15 микросекунд. Датчик отправляет ультразвуковой сигнал «chirp» из восьми коротких импульсов частотой выше предела диапазон слуха человека. Электроника датчика знает скорость звука в воздухе. Измеряя время между отправленным и принятым ультразвуком, ультразвуковой датчик HC-SR04 формирует выходной сигнал. Этот принцип эхолокации используют дельфины и летучие мыши. Спустя примерно микросекунду ультразвуковой датчик HC-SR04 выдает на выходе Echo импульс высокого уровня длительностью до 38 миллисекунд. Если препятствий не обнаружено, то на выходе будет сигнал с длительностью 38 мс. Таким образом, для работы с датчиком от электроники прибора требуется один цифровой управляющий выход и один вход для сигнала датчика. Длина импульса на выходе Echo пропорциональна расстоянию до препятствия. Расстояние вычисляется по формуле: S=F/58, где S – расстояние в сантиметрах, F – продолжительность импульса в микросекундах. Для взаимодействия Arduino с датчиком есть программная библиотека Ultrasonic.
Датчик отправляет ультразвуковой сигнал «chirp» из восьми коротких импульсов частотой выше предела диапазон слуха человека. Электроника датчика знает скорость звука в воздухе. Измеряя время между отправленным и принятым ультразвуком, ультразвуковой датчик HC-SR04 формирует выходной сигнал. Этот принцип эхолокации используют дельфины и летучие мыши. Спустя примерно микросекунду ультразвуковой датчик HC-SR04 выдает на выходе Echo импульс высокого уровня длительностью до 38 миллисекунд. Если препятствий не обнаружено, то на выходе будет сигнал с длительностью 38 мс. Таким образом, для работы с датчиком от электроники прибора требуется один цифровой управляющий выход и один вход для сигнала датчика. Длина импульса на выходе Echo пропорциональна расстоянию до препятствия. Расстояние вычисляется по формуле: S=F/58, где S – расстояние в сантиметрах, F – продолжительность импульса в микросекундах. Для взаимодействия Arduino с датчиком есть программная библиотека Ultrasonic.
Шаг 1: На вход Trig подаётся импульс длительностью 10 микроСекунд. Для дальномера это команда начать измерение расстояния перед ним.
Для дальномера это команда начать измерение расстояния перед ним.
Шаг 2: Устройство генерирует 8 ультразвуковых импульсов с частотой 40 кГц через выходной сенсор T.
Шаг 3: Звуковая волна отражается от препятствия и попадает на принимающий сенсор R.
Шаг 4: На выходе Echo формируется импульс, длительность которого прямо пропорциональна измеренному расстоянию.
Шаг 5: На стороне управляющего контроллера переводим длительность импульса Echo в расстояние по формуле: ширина импульса(мкс) / 58 = дистанция (см).
Ниже на рисунке приведены временные диаграммы, наглядно поясняющие перечисленные шаги.
На сигнал Trig нужно подавать короткие импульсы длительностью 10мкс. Этот импульс запускает эхо-локатор. Он уже сам генерирует пачку ультразвуковых импульсов (40кГц) для излучателя и сам ловит отраженное эхо. По времени распространения звука туда и назад датчик определяет расстояние. Нам же сам датчик на контакт Echo выдает импульс с длительностью пропорциональной расстоянию. Длительность сигнала Echo от 150мкс до 25мс. Если ответа нет, то длительность Echo около 40мс. Расстояние до объекта можно вычислить разделив длительность в микросекундах эха на 58. Получаются расстояние в сантиметрах. Максимальное расстояние, которое можно мерить судя по документации — 5 метров.
Он уже сам генерирует пачку ультразвуковых импульсов (40кГц) для излучателя и сам ловит отраженное эхо. По времени распространения звука туда и назад датчик определяет расстояние. Нам же сам датчик на контакт Echo выдает импульс с длительностью пропорциональной расстоянию. Длительность сигнала Echo от 150мкс до 25мс. Если ответа нет, то длительность Echo около 40мс. Расстояние до объекта можно вычислить разделив длительность в микросекундах эха на 58. Получаются расстояние в сантиметрах. Максимальное расстояние, которое можно мерить судя по документации — 5 метров.
Рекомендуемый период опроса датчика 50-10мс. Диаграмма направленности датчика не очень острая — примерно градусов под тридцать.
- Действие ультразвукового дальномера HC-SR04 основано на принципе эхолокации. Он излучает звуковые импульсы в пространство и принимает отражённый от препятствия сигнал. По времени распространения звуковой волны к препятствию и обратно определяется расстояние до объекта.
Запуск звуковой волны начинается с подачи положительного импульса длительностью не менее 10 микросекунд на ножку TRIG дальномера. Как только импульс заканчивается, дальномер излучает в пространство перед собой пачку звуковых импульсов частотой 40 кГц. В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала («Задержка эхо» на рисунке) определяется расстояние до объекта.
Диапазон измерения расстояния дальномера HC-SR04 — до 4 метров с разрешением 0,3 см. Угол наблюдения — 30 градусов, эффективный угол — 15 градусов. Ток потребления в режиме ожидания 2 мА, при работе — 15 мА. - Запуск звуковой волны начинается с подачи положительного импульса длительностью не менее 10 микросекунд на ножку TRIG дальномера. Как только импульс заканчивается, дальномер излучает в пространство перед собой пачку звуковых импульсов частотой 40 кГц. В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала («Задержка эхо» на рисунке) определяется расстояние до объекта.
Диапазон измерения расстояния дальномера HC-SR04 — до 4 метров с разрешением 0,3 см. Угол наблюдения — 30 градусов, эффективный угол — 15 градусов. Ток потребления в режиме ожидания 2 мА, при работе — 15 мА.

 В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала («Задержка эхо» на рисунке) определяется расстояние до объекта.
В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала («Задержка эхо» на рисунке) определяется расстояние до объекта.Рис. 40. Пьезоэлектрический ультразвуковой преобразователь: А — входное напряжение приводит к изгибу элемента, что вызывает генерацию ультразвуковых волн. И наоборот, в результате воздействия волн на выходе преобразователя появляется напряжение; Б — ультразвуковой преобразователь с открытой апертурой для работы в воздухе
- Подробнее: https://www.kakprosto.ru/kak-918792-kak-podklyuchit-ultrazvukovoy-dalnomer-hc-sr04-k-arduino#ixzz4PeP45Mxx
- Контакты, по порядку слева направо, с лицевой стороны:
- Vcc – питание 5В
- Trig – вход
- Echo – выход
- Gnd –земля
Процесс работы:
- Подключаем датчик к питанию и к управляющему устройству
- Посылаем на вход дальномера (Trig) сигнал длительностью 10мкс (или чуть больше, он срабатывает с 10мкс)
- Динамик датчика издает 8 сигналов частотой 40кГц, и микрофон получает их эхо (или не получает)
- Датчик подает на свой выход (Echo) сигнал длительностью соответствующей расстоянию до препятствия: 150мкс (при 2см до препятствия) – 25мс (при 4м до препятствия) и 38мс при отсутствии преграды. На заметку: звук проходит расстояние 4см (2см от динамика до препятствия и 2см обратно до микрофона) за 0.04м / 335м/с = 0,000119с=119мкс и 8м за 8м / 335м/с = 0,023881с = 23,881мс.
Какое время проходит от срабатывания датчика по входному сигналу до начала пункта 3 и от начала пункта 3 до начала пункта 4 нигде не сказано – это скоро будет выяснено мной опытным путём.
Для расчета расстояния до препятствия используются следующие формулы:
- Длина выходного импульса в микросекундах / 58 = расстояние в сантиметрах
- Длина выходного импульса в микросекундах / 148 = расстояние в дюймах
 На заметку: звук проходит расстояние 4см (2см от динамика до препятствия и 2см обратно до микрофона) за 0.04м / 335м/с = 0,000119с=119мкс и 8м за 8м / 335м/с = 0,023881с = 23,881мс.
На заметку: звук проходит расстояние 4см (2см от динамика до препятствия и 2см обратно до микрофона) за 0.04м / 335м/с = 0,000119с=119мкс и 8м за 8м / 335м/с = 0,023881с = 23,881мс.Схема модуля HC-SR04 имеет 2 преобразователя ультрозвуковых сигналов в электрические сигналы малой мощности, один TCT40-16T — (T — Transmiter на схеме обозначен как Emit MK2 смотри схему) предназначен для передачи (эмиссии) ультразвуковых волн в окружаюшее пространство а второй TCT40-16R (R — Receive на схеме обозначен как Receive MK1 смотри схему) для приема отраженных ультрозвуковых волн от предметов окружающего мира.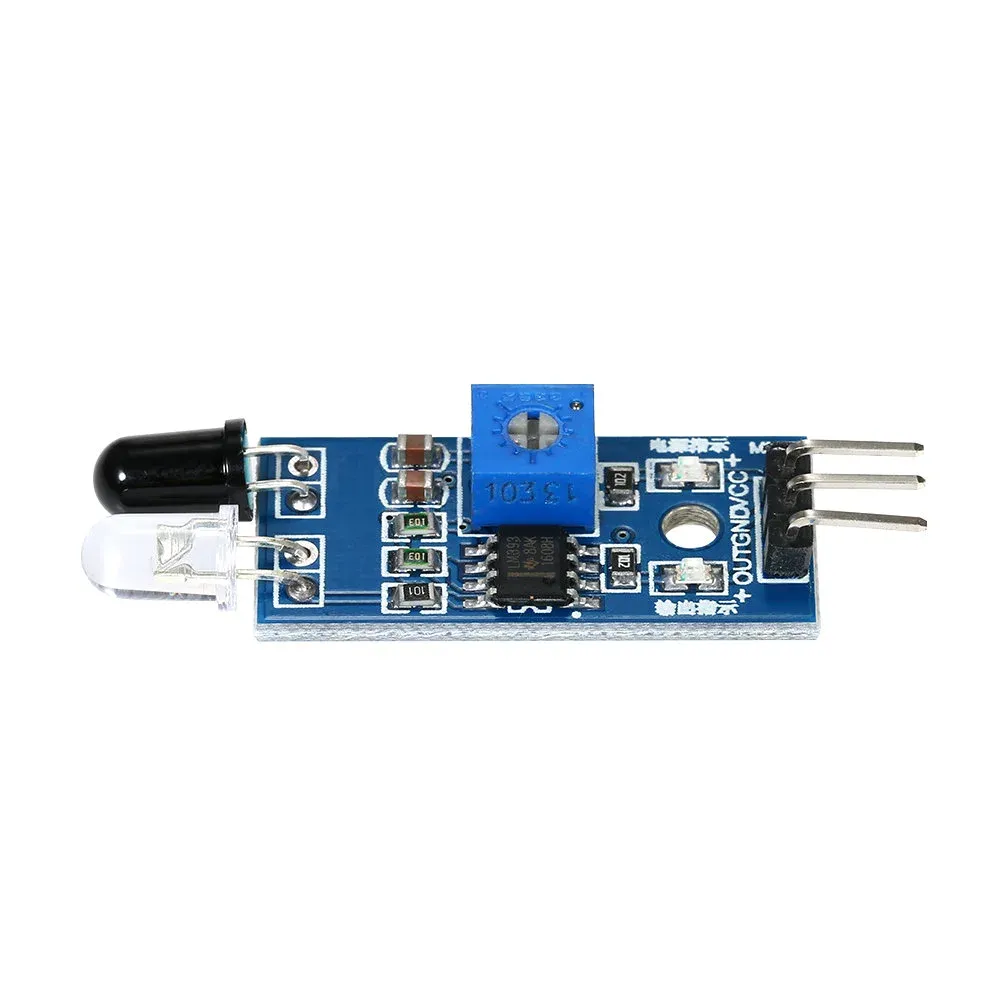
Для передачи ультразвуковых волн требуется относительно высокое напряжение. Микросхема MAX232 (обозначение на плате — U3 смотри схему) усиливает 5 вольт входного питающего напряжения до +/- 9-10 вольт. Микросхема MAX232 подключается между двумя выходами ( T OUT1 — вывод 14 и T OUT2 вывод 7 смотри схему) , так что на самом деле амплитуда значения напряжения импульсов подающихся на ультрозвуковой передатчик достигает до 20 вольт. Питание подается на микросхему MAX232 через транзистор Q2 (в новой схеме отсутствует и питание подается напрямую на вход 16 микросхемы и в этом случае отключения микроконтроллером не происходит) некоторое время до и во время излучения импульса , так как внутреннее переключение заряда создает избыточный шум на приемной стороне модуля. Когда модуль переходит в режим приема на микросхеме MAX232 отключается питание выходом 10 — Signal микроконтроллера EM78P153S (EM78P153S китайский микроконтроллер работает на частоте < 27 МГц .
Прием и выделение электрических импульсов поступающих с преобразователя ультразвуковых сигналов TCT40-16R осуществляется микросхемой LM324 (обозначение на плате — U1 смотри схему) , который содержит 4 операционных усилителя. Операционный усилитель U2D (смотри схему) усиливает сигнал в 6 раз. Операционный усилитель U2C имея обратную связь (1 — го порядка) является полосовым фильтром , затем операционный усилитель U2B усиливает входной сигнал еще 8 раз. Последний операционный усилитель U2A используется вместе с Q1 в качестве гистерезиса компаратора где происходит выделение прямоугольных импульсов и аналогового входного сигнала. Я моделировал фильтр в PSpice и не центрирована 40KHz , как это должно быть , но вместо этого он имеет пик 18kHz. Изменяя только два резистора (R13 до 2K2 и R11 до 18К) отклик фильтра смещается на частоту пульса , и это значительно повышает чувствительность обнаружения.
МИКРОКОНТРОЛЛЕР ESP-8266 И УЛЬТРАЗВУКОВОЙ ДАТЧИК HC-SR04
Переделка ультразвукового датчика HC-SR04
Рис. 4 Ультразвуковой излучатель/приемник TCT40-16R/T (стоимость вместе с внутренним микроконтроллером и микросхемами усиления сигнала < $1 )
4 Ультразвуковой излучатель/приемник TCT40-16R/T (стоимость вместе с внутренним микроконтроллером и микросхемами усиления сигнала < $1 )
Рис. 5 Пространственная диаграмма излучения ультразвукового излучателя/приемника TCT40-16R/T (если бы мы видели ультразвук, то так бы мы видели распространение ультразвуковых волн в пространстве)
Характеристики ультразвукового излучателя/приемника TCT40-16R/T
1. Model: TCT40-16R/T (16 мм в диаметре)
2. Номинальная частота (Кгц): 40 КГц
3. Излучение At10v звукового давления (дб = 0.02mPa): ≥ 117dB
4. чувствительность Приемника at40KHz (дб = V/ubar): ≥-65dB
5. Электростатический потенциал at1KHz, < 1 В (PF): 2000 ± 30%
Ультразвуковые преобразователи справка 1
Ультразвуковые преобразователи справка 2
ПРИМЕНЕНИЕ
Эхолот. Рубрика «Как это работает?»
Ультразвуковые датчики Murata
 youtube.com/embed/E_N4_mCgn20?rel=0″ frameborder=»0″ allowfullscreen=»allowfullscreen»/>
youtube.com/embed/E_N4_mCgn20?rel=0″ frameborder=»0″ allowfullscreen=»allowfullscreen»/>
Датчики, предназначенные для автоматов парковки, имеют высокую чувствительность: при резонансной частоте, равной 40 кГц. Дальность действия датчика достигает 1,5 метров при разрешающей способности 9 мм. Выпускаются датчики с различной диаграммой направленности, как симметричной (круговой), так и не симметричной (овальной).
Подключение к Arduino
Если вы планируете использовать ультразвуковой дальномер HC-SR04 с Arduino вы можете воспользоваться существующими библиотеками:
Распиновка:
- Vcc — положительный вывод питания
- TRIG — вход TRIG
- ECHO — выход ECHO
- GND — ноль питания
На выводы питания подается постоянное напряжение 5 В, потребляемый ток в рабочем режиме около 15 мА.
Вход TRIG подключается к любому выводу микроконтроллера. На этот вывод нужно подавать импульсный цифровой сигнал длительностью 10 мкс. По сигналу на входе TRIG датчик посылает ультразвуковые импульсы.
После приема отраженного сигнала, датчик формирует на выводе ECHO импульсный сигнал, длительность которого пропорционально расстоянию до преграды.
Контакты датчика можно соединить с макетной платой или Arduinoпроводами «мама-папа». А с Troyka Shield через провода «мама-мама».
Этот дальномер может служить прекрасным датчиком для робота, благодаря которому он сможет определять расстояния до объектов, объезжать препятствия, или строить карту помещения. Его можно также использовать в качестве датчика для сигнализации, срабатывающего при приближении объектов.
Технические характеристики
https://www.yourmestudio.com/rcw-0002-ultrasonic-ranging-module-p717.html
- Напряжение питание: 5 В
- Потребление в режиме тишины: 2 мА
- Потребление при работе: 15 мА
- Диапазон расстояний: 2–400 см
- Эффективный угол наблюдения: 15°
- Рабочий угол наблюдения: 30°
Описание продукта:
ТК T 40-16 т/r 1
(Tc): piezoceramics Ультразвуковой датчик
(T): Категория t-общность
(40): Центральная частота (кгц)
(16): наружный диаметр? (мм)
(T): использование режим: излучатель; r-приемник; tr-совместимость излучатель и приемник
(1): ID — 1,2, 3…
Тестирования цепи
- 1 синусоидальный генератор 1 охватил сигнала Генератор
- 2 cymometer 2 Частотомер
- 3 стандартных динамик 3 вольтметр
- 4 Получить модель датчика 4 излучают модель датчика
- 5 осциллографа 5 Стандартный микрофон
- 6 аудио частотные характеристики Дисплей прибора
Производительность продукта
1). Номинальная частота (кГц): 40 кГц
Номинальная частота (кГц): 40 кГц
2). излучать звук pressureat10V (= 0.02Mpa):? 117dB
3). Прием Чувствительность приемника at40KHz (дБ = v/ubar):?-65dB
4). Электростатический потенциал at1KHz, <1 В (PF): 2000 +/-30%
5). Диапазон обнаружения (м): 0.2 ~ 20
6).-6дБ угол направления: 80o
7). Обшивка материал: алюминий
8). Обшивка ЦВЕТ: серебристый
УСТРОЙСТВО
Пьезоэлемент
RCW-0012
Ультразвуковой датчик
Ultrasonic Ranging Module HC — SR04
РАЗРАБОТКА РОБОТА НА ОСНОВЕ УЛЬТРАЗВУКОВОГО ДАЛЬНОМЕРА
Прототип мобильного робота на Arduino mega
Проекты Altera Quartus II для платы Марсоход
Ультразвуковой дальномер HC-SR04. Подключаем к Arduino.
Урок 19. Работа с ультразвуковым датчиком расстояния HC-SR04 в BASCOM-AVR
Radar проекта
Ультразвуковой дальномер HC-SR04 подключение к Arduino
HC-SR04 Дальномер ультразвуковой
Ультразвуковой датчик HC-SR04 – дальномер на микроконтроллере
https://www.alibaba.com/product-detail/HC-SR04-Ultrasonic-Module-Distance-Measuring_1898465949.html
https://www.elecfreaks.com/store/download/product/Sensor/HC-SR04/HC-SR04_Ultrasonic_Module_User_Guide.pdf
https://arduino-kit.ru/userfiles/image/HC-SR04%20_.pdf
https://robocraft.ru/blog/arduino/770.html
Ультразвуковой датчик измерения расстояния HC-SR04
The Application of PWM Capture (Data Acquisition) and Ultrasonic Sensors
Pengetahuan Dasar Таймер Untuk Pengukuran Jarak Dengan Ультразвуковой
Запуск сервопривода с помощью датчика расстояния HC-SR04 и Arduino
https://robocraft.ru/blog/electronics/772.html
Raspi-отстойника в октябре 2014 Embedded Выпуск LinuxJournal
https://www.arduino.cc/en/Tutorial/Ping
Простой искатель ультразвуковой диапазон с помощью HC-SR04
Датчик Препятствие с помощью Arduino и HCSR04
Как проверить DYP-ME007 Ультразвуковой дальномер с использованием NE555 и мультиметра
https://macduino.blogspot.ru/2013/11/HC-SR04-part1.html
Сонар для инвалидов по зрению
https://hackaday.io/project/5903/logs
https://h
ackaday.io/project/5903-sonar-for-the-visually-impaired/log/18329-ultrasonic-module-virtual-teardown
https://www.maxbotix.com/performance.htm
https://amperka.ru/product/ultrasonic-urm37
https://image.dfrobot.com/image/data/SEN0002/URM04V2.0Mannual1.1.pdf
https://people.ece.cornell.edu/land/courses/ece4760/FinalProjects/s2012/xz227_gm348/xz227_gm348/URM3.2_Mannual_Rev2.pdf
RCW-0012 Ультразвуковой Модуль Расстояние Измерительный Преобразователь Тест Модуля Индикации
https://www.farnell.com/datasheets/81163.pdf?_ga=1.169892256.1853603956.1478607467
https://chinaultrasound.en.alibaba.com/product/60268805778-800581237/40Khz_TCT40_16R_T_Air_Ultrasonic_Ceramic_Transducer_Ultrasonic_Sensor.html
https://ezoneda.company.weiku.com/item/SRF05-five-Pin-Ultrasonic-ranging-module-Ultrasonic-sensor-15404413.html
Использование ультразвукового дальномера
Пьезоэлектродвигатели
Пьезоэлектрический преобразователь как альтернативный источник энергии
Пьезоэлектрические преобразователи в ультразвуковой диагностике
Импульсные ультразвуковые сонары открытого типа
Пьезо-сенсор стука на Arduino UNO
Справочник ультразвуковых излучателей и приемников
Audiowell Electronics (Guangdong) Co, Ltd.
Pro-Wave Electronics Corporation (Тайвань)
Ultrasonic Sonar Ranging IC — PW0268
Miniature Tuning Fork Quartz Crystals
Air Ultrasonic Ceramic Transducers 320SR093
Sonar Ranging Module SRM400
400EP250 Pulse Transit Enclose Type Ultrasonic Transduce
Сеть магазинов «Кварц»
https://www.stroykat.by/tipyi-datchikov-rashoda-zhidkostey.html
Робот Боб своими руками
Автор этой самоделки уже однажды пытался сделать автономного робота избегающего препятствия, и теперь решил представить его улучшенную версию. Автором было решено назвать робота Боб. В предыдущей версии робота был ряд недочётов и недостатков. В этой модели улучшены:
— Система питания
— Установлены дополнительные датчики
— Более качественные соединения
— Установлен более быстрый контроллер
Для питания Боб использует аккумулятор на 9,6В, и импульсный регулятор напряжения. Создатель робота добавил ещё один ИК датчик GP2D12, и улучшил крепление всех остальных. Ультразвуковой дальномер был поставлен на сервопривод, для возможности улучшенного сканирования местности. Микроконтроллер ATmega168 был установлен на Arduino. Автор любит проекты с микроконтроллерами, в особенности проектировать на них робота, и считает это лучшим способом показать их возможности.
Материалы:
— Arduino
— Сервопривод Futaba S3003 1 шт
— Сервоприводы непрерывного вращения Parallax 2 шт
— Кабельные стяжки
— Провода разной длинны
— Разъем для аккумулятора
— Кабель 3 Пин для датчика
— Макетная плата
— Дальномер ультразвуковой
— Инфракрасные датчики GP2D12 3 шт
— Никель-кадмиевый аккумулятор 9,6В
— Стабилизатор напряжения импульсный 5В, 1А
— Шасси (автором используются из комплекта «BOE-Bot Kit»). Использовать для шасси можно пластик или оргстекло, возможно, даже кусок дерева правильной формы.
— Пьезопищалка (для индикации начала работы)
— Светодиод 1 шт
— Резистор для светодиода 200 Ом
Шаг первый. Установка ИК датчиков.
У датчика на кронштейне имеются несколько отверстий, они совпадают с отверстиями на шасси. Автор закрепляет их с помощью двух винтов и гаек.
Шаг второй. Дальномер с сервоприводом.
Сервопривод в роботе служит для панорамного обзора ультразвукового датчика, таким образом, он захватывает большую область перед собой, и измеряет расстояние под разными углами. Имеющиеся винты не подходили для нужных целей, подходящие продавались только специализированных магазинах. Было решено сделать монтажный кронштейн своими руками, и не тратить лишних средств. Была сделана стойка из плексигласа, для установки дальномера. Автор вырезал два куска органического стекла размером чуть больше чем дальномер, просверлил отверстия и склеил эти части под прямым углом. Дальше, сделали отверстие размером чуть больше винта сервомотора, и с его помощью закрепили сервомотор.
Примечание по сервоприводу:
Нет никакой необходимости покупать именно Futaba S3003, подойдёт любой сервопривод, который может вращаться на 180 градусов. При поисках серво создатель Боба руководствовался только этим параметром, и нашёл самый дешёвый сервопривод, который мог выполнить поставленную задачу. При этом требуется настроить значение ШИП в программе под другой привод.
Шаг третий. Установка Arduino.
Для улучшенного быстродействия создатель Боба использовал ATmega168, она хоть работает и на низкой частоте, но со своими задачами справляется гораздо быстро и отвечает поставленным требованиям.
В интернете была найдена макетная плата для установки на неё Arduino, соединив плату с Arduino. Соединив их вместе, автор начал подключение проводов:
— Пин (АЦП) 0: Левый GP2D12
— Пин (АЦП) 1: Центральный GP2D12
— Пин (АЦП) 2: Правый GP2D12
— Пин 5: Сервопривод дальномера
— Пин 6: Левый сервопривод
— Пин 7: Ультразвуковой дальномер
— Пин 9: Правый сервопривод
— Пин 11: Пьезопищалка
В проекте не используются дополнительные конденсаторы, достаточно встроенных в стабилизаторе 5В. Между светодиодом и VCC используется резистор 220 Ом.
Шаг четвёртый. Программный код.
Учитывая предыдущие ошибки при первом создании робота, были внесены поправки, понимание кода не составит труда. Также из кода вырезаны лишние части, которые не используются. Часть кода отвечающая за показания дальномера была взята с сайта Arduino. Код можно скачать под статьёй.
Шаг пятый. Заключение.
В дальнейшем автор будет экспериментировать над Бобом, и улучшать его добавлением новых датчиков, таких как датчик света и звука, с фоторезистором робот сможет обнаружить людей. Пространство для модернизации велико, нужна только фантазия.
На данный момент Боб может только избегать препятствия. Ик датчики обнаружат объекты на пути, а ультразвуковой дальномер прикрывает слепые пятна ИК датчиков, также дальномер служит для поиска пути при обнаружении препятствий. При полном заряде батареи Боб сможет ездить около 1 часа 20 минут. Также автор думает как усовершенствовать внешний вид Боба.
Демонстрация работы Боба:
Источник (Source) Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.
Датчик движения Ардуино
Сегодня я хочу рассказать про такой замечательный датчик как HC-SR501. Как просто, быстро, а главное совсем не трудно собрать на нём устройство, которое может работать и как охранная система, и которое поможет вам сберечь много денег за счёт экономии электроэнергии. Собрать прототип схемы подключения датчика из набора можно за 10-20 минут. Это сможет даже ребёнок, но никто ведь не знает как это просто, а вот удивление гостей и друзей вам обеспечено. Да и сделанное своими руками всегда радует больше чем покупное.
Этот датчик может не только включать свет и экономить электроэнергию. Он так же с небольшими доработками может выполнять разные функции.
Что же можно сделать:
Удобство
- Включать свет
- вентилятор в туалетной комнате включается при нахождении человека и отключается через определённое время после ухода
- Освещать дорожки в саду, не всю ночь, а только когда проходишь рядом
- Фонарные столбы
- Крыльцо и освещение замочной скважины
- Подсветку ступеней лестницы
- А можете переходя из одной комнаты в другую слушать музыку
- Свет в шкафу или кладовой
Безопасность(в комплекте с другими системами)
- Включить тревогу когда будет движение
- Отправить SMS
- Включить фото и видеосъёмку
- Включить голосовое сообщение, напр.»Вы нарушаете закон. Информация об этом отправлена в полицию. Они уже едут.»
- Включить замаскированные микрофоны и вести скрытую запись.
- и много ещё чего можно сделать
Нам всем иногда приходится ночью, в потьмах, идти на ощупь. Чтобы не разбудить окружающих мы не включаем свет. Вот в такие моменты нас выручит датчик движения, который включит ночник и выключит его тоже сам.
Здесь будет серия статей, где я постараюсь разместить полную информацию про этот датчик, что бы у вас не возникла необходимость обращаться ещё куда- нибудь.
Но в связке с любой из плат Ардуино применение этого датчика просто огромное.
Так что же это такое
Датчик движения Ардуино?Это PIR датчик. PIR(Passive Infrared) ,что значит «пассивный инфракрасный» датчик. Пассивный — это потому что датчик не излучает, а только принимают излучение. Поэтому такие датчики очень экономичны. Потребления всего 50µА. Работают датчики на основании изменения температур. Любой предмет излучает инфракрасные волны которые не видны человеческому глазу. Человек или животное(даже маленькая кошка) ни кто не пройдёт мимо датчика. Охотникам за приведениями этот датчик не подойдёт -(.
Характеристики датчика движения HC-SR501
- Рабочее напряжение: 5V до 20V(может работать и от 4,5V)
- Потребляемая мощность в работающем состоянии:50mA
- В режиме ожидания <50µА*
- Уровень выходного сигнала: высокий 3,3V (HIGH), низкий 0V (LOW)
- Время задержки: регулируется подстроечными резисторами (5 секунд до 5 минут)
- Блокировка: 0,2 секунд
- Режимы работы:L — не повторяющийся, H — повторяющийся
- Дальность срабатывания : от 3 до 7 метров. Если вам нужно срабатывание на маленьком расстоянии, то следует обратить внимание на Ультразвуковой дальномер HC-SR04(от 2см до 3м) или датчик ИК излучения YL-73(от 0,1 см до 10-15 см)
- Угол обзора менее 120° (конус)
- Рабочая температура: от -15°С до+ 70°С
- Размеры платы: 32*24 мм, резьбовое отверстие 28 мм, диаметр винта 2 мм
- Линза Френеля**: диаметр Ø23 мм
Линза Френеля выполнена из пластика в виде полушария состоящим из множества ячеек и если на какой-нибудь из них изменилось состояние, то это вызовет срабатывание датчика движения.
Бесконтактный датчик движения hc sr501 может работать отдельно, сам по себе, но лучше всего его использовать в связке с любой из плат Ардуино , с радиомодулем nRF24L01+ или WiFi модуль ESP8266 ESP07. Тогда можно достичь значительно больших результатов. Подробнее смотрите в Подключении и на странице видео.
При первом включении(подаче напряжения) датчик движения начнёт калиброваться. Приблизительное время 60сек(1мин). После этого датчик готов к работе. Между срабатыванием существует задержка приблизительно 5 секунд, в это время датчик не среагирует на движение, но запомнит его и как только пройдёт время задержки, то он включится даже если и не будет никакого движения. Если для вас это неприемлемо, то можно установить 2 датчика движения и настроить их на разное время срабатывания, например один на 20 сек, а второй на 30 сек.
Вид сверху Вид снизу
Со снятой линзой Френеля
С установленным фоторезистором Регулировка чувствительности и времени
Инфракрасный датчик движения hc sr501 схема подключения
У датчика есть 3 вывода:
VCC + положительный контакт источника питания от 4,5V до 20V
OUT S выходной сигнал с датчика движения есть движение +3,3V(HIGH), нет движения 0V(LOW)
GND — отрицательный контакт источника питания
Расширить сферу применения датчика движения hc sr501 можно добавив всего 1 деталь, Фоторезистор GL5506. Если припаять его на датчик движения, для этого там есть отверстия, то теперь датчик будет срабатывать только если будет темно***.
Датчик движения можно использовать вместо выключателя света. Это очень удобно, особенно ночью или когда заняты руки.
В режиме ожидания на выходе датчика движения будет 0V(логический ноль). Как только датчик среагирует на какое-нибудь движение то на выходе станет 3,3V(логическая единица). В зависимость от установленного режима H или L режим работы будет разный. Устанавливается перемычкой.
если:
Н — повторяющийся. Датчик не отключится пока есть движение. Когда движение прекратится, то он выключится когда закончится установленное время работы.
L — не повторяющийся. Когда закончится установленное время работы датчик отключится, перейдёт в 0V, даже если будет движение. Затем если датчик «увидит» движение то он снова включится.
Схему подключения датчика движения на 5 вольт можно посмотреть здесь, а на 12 вольт здесь.
Чтобы включать нагрузку на 220 вольт с hc sr501 нужно взять реле. Теперь мы сможем управлять светом, включать вентилятор, включить прожектор на даче или свет на фонарном столбе.
Очень удобно использовать датчик hc sr501 для ночника.
Вот некоторые отзывы о датчике.
- Датчик надёжный, простой в использовании. Работает уже примерно год. Ложных срабатываний не было. Илья.
- Чувствительный. Срабатывает даже на кошку. Пётр.
- Дешёвый, надёжный, незаметный. Установил в подъезде. Работал всю зиму. Евгений.
- было ещё много отзывов.
PS
Датчики движения hc sr501 имеют высокую чувствительность, устойчивость к различным помехам, очень надежны, практически отсутствуют ложные срабатывания. И самое главное они НЕДОРОГИЕ. Позволяют сэкономить ваши деньги.
* Время работы от батарейки в ждущем режиме примерно год. Это в тепличных условиях, на самом деле зависит от многих факторов.
**Линза Френеля — представляет собой оптическую деталь со сложной ступенчатой поверхностью.
*** Нет возможности настроить срабатывание датчика от степени освещённость. Если есть такая необходимость, то надо применять совместно с Ардуино.
Создание дешевого лазерного дальномера для Arduino
Нужен быстрый и дешевый модуль лазерного дальномера для вашего проекта Arduino?
Конечно, для этой задачи можно использовать специализированные модули, но большинство из них имеют большую цену. Модули VL53L0X / VL53L1X дешевы, но имеют очень большое поле зрения.
Итак, я нашел решение: использовать дешевую лазерную рулетку «Х-40» в качестве лазерного дальномера. Эти устройства стоят 20 долларов и меньше, и они могут измерять расстояние до 40 м с точностью ~ 3 мм.Но есть две проблемы — нет возможности снять показания с ленты и измерения идут медленно — менее 1 Гц.
Чтобы решить эту проблему, я сделал реверс-инжиниринг этой лазерной рулетки и написал свою собственную прошивку для микроконтроллера STM32 модуля лазерного дальномера. Для меня важна скорость измерения, и я могу достичь ~ 60 Гц, но максимально стабильное расстояние уменьшилось до ~ 6 м (полный максимальный диапазон 37 м, но я не тестировал).
Точность измерения расстояния может варьироваться от 1 мм до 10 мм в зависимости от цвета объекта и расстояния.
Размеры модуля: 25x13x50 мм.
ВАЖНОЕ ЗАМЕЧАНИЕ: ВЫ ПОТЕРЯЕТЕ ОРИГИНАЛЬНОЕ ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ, ПОЭТОМУ ПОСЛЕДНИЕ УСТРОЙСТВО НЕ МОЖЕТ ИСПОЛЬЗОВАТЬСЯ В КАЧЕСТВЕ ЛЕНТОЧНОГО ИЗМЕРИТЕЛЯ!
Обратите внимание, что лазерная рулетка «Х-40» может иметь разные ревизии модуля лазерного дальномера, и моя прошивка поддерживает только некоторые из них!
«Х-40» — не единственное название для лазерных рулеток с такими модулями — я знаю, что существует несколько разных китайских лазерных рулеток с подходящими модулями.
Шаг 1: Разборка лазерной рулеткиРазберем лазерную рулетку, чтобы достать из нее модуль лазерного дальномера.
Из корпуса нужно открутить 7 винтов:
Лазерная рулетка в разобранном виде:
Внутри корпуса прибора виден небольшой модуль лазерного дальномера. Вам необходимо отсоединить ленточные кабели от модуля и вынуть модуль из корпуса:
Обратите внимание, что модуль имеет маркировку «701A». Моя прошивка поддерживает только версии модулей «512A» и «701A».Несколько пользователей подтвердили, что модули «703A» тоже работают (я не тестировал).
UPD 11/2019:
Внимание: обнаружено, что более новые лазерные рулетки «x-40» поставляются с модулями «M88B». Маркировка «88B» на печатной плате рядом с MCU. Эти модули основаны на микроконтроллере STM32F0 (имеет пакет QFN-32). Эти модули не поддерживаются моей прошивкой!
Если ваш модуль поддерживается, вам необходимо отпаять силовые линии от модуля.
Шаг 2: Программирование модуля лазерного дальномераВам необходимо записать специализированную прошивку в MCU модуля, чтобы получить необходимую функциональность.
1. Сначала нужно припаять несколько проводов для программирования MCU. Распиновка показана на рисунке:
Подключите контакты 7-8 разъема клавиатуры — это необходимо для включения питания.
Линии «GND» и «Vbat» должны быть подключены к источнику питания. Диапазон напряжения питания +2,7 … + 3,3 В. При подаче питания на модуль на линии «Vdd» должно быть +3,5 В.
Линии «GND», «SWDIO», «SWCLK», «NRST» должны быть подключены к программатору ST-LINK. Строка «NRST» очень важна — оригинальная прошивка MCU заблокирована, поэтому эта строка нужна для входа MCU в режим программирования.
У некоторых программистов есть эта строка, а у некоторых (дешевых) нет, но есть обходной путь для этой проблемы.
Кроме того, некоторым программистам (например, оригинальному «ST-LINK / V2») требуется, чтобы линия «Vbat» была соединена с линией «VCC / TVCC» программатора.
Пример подключений (у этого программатора нет строки «NRST»):
2. Установите на ПК «Утилиту ST-LINK». Если у вас нет опыта использования этого программного обеспечения, в Интернете есть множество учебных пособий.
Вам необходимо настроить утилиту (Target -> Settings):
Если ваш программатор имеет выход «NRST», вы можете просто включить питание и нажать «Target -> Connect» в утилите.
Если такой линии нет, необходимо выполнить следующие действия:
- Включите питание.
- Подключите линию «NRST» модуля к GND.
- Нажмите «Target -> Connect» в утилите.
- Быстро отсоедините линию «NRST» от GND.
- Утилита должна показывать соединение
У вас должно получиться такое изображение:
3. Флэш-память MCU заблокирована для чтения, поэтому вам необходимо отключить «Защиту от чтения». На этом этапе вы потеряете оригинальную прошивку!
Открыть цель -> меню «Байты опций».Должны быть такие настройки:
Переключите «Защита от чтения» на «Отключено» и нажмите кнопку «Снять выделение», затем нажмите кнопку «Применить». Попробуйте перезапустить модуль (отключив питание).
Нажмите Target -> Connect. В окне журнала должна быть информация об успешном соединении, и вы должны увидеть содержимое памяти — заполненное 0xFF. Теперь вы можете загрузить кастомную прошивку в MCU.
4. Необходимая прошивка находится здесь: https://github.com/iliasam/Laser_tape_reverse_engineering/tree/master/Code/Firmware_dist_calculation_fast
Выберите подходящий файл HEX для вашего модуля и загрузите его во Flash MCU с помощью «ST- LINK «.
Шаг 3: Подключение модуля лазерного дальномера к ArduinoВам необходимо припаять провод или какой-либо разъем к контактной площадке TX на плате:
См. Схему подключения ниже.
Во-первых, вам необходимо проверить исправность модуля дальномера. На этом этапе вам не нужно подключать OLED-дисплей к Arduino — просто подключите линию TX модуля лазерного дальномера к линии TX Arduino, а линии питания модуля к источнику питания + 3V.
Создайте пустой скетч и загрузите его в Arduino. Откройте «Serial Monitor» в среде Arduino IDE. Выберите скорость передачи: 250000
Если модуль дальномера работает нормально, вы получите те же данные:
DIST; 01937; AMP; 0342; TEMP; 1223; VOLT; 115 DIST; 01937; AMP; 0343; TEMP; 1223 ; VOLT; 115 DIST; 01938; AMP; 0343; TEMP; 1223; VOLT; 115 DIST; 01938; AMP; 0343; TEMP; 1223; VOLT; 115
. этот тест. Выберите в его утилите 256000 бод (это реальная скорость x-40 MCU).
Во-вторых, нужно собрать полную схему с дисплеем.
Подключите линию TX модуля лазерного дальномера к линии RX Arduino (вам необходимо отключить этот провод во время загрузки программы в Arduino).
Если все работает нормально, вы получите тот же результат:
Вы увидите дисплей с 3 цифрами:
- «COUNT» — счетчик полученных значений
- «AMPL» — амплитуда сигнала. Символическая полоса («<--->») ниже показывает амплитуду графически (в логарифмическом масштабе).
- Самое большое значение — расстояние в метрах и миллиметрах.
После первого запуска модуль лазерного дальномера необходимо откалибровать.
Вам нужно разместить какой-нибудь белый объект на определенном расстоянии от модуля. Расстояние до этого объекта станет нулевым расстоянием для модуля дальномера. Чтобы начать процесс калибровки, вам необходимо подключить клавиатуру к лазерной рулетке и нажать нижнюю кнопку. Модуль издаст два звуковых сигнала — в начале калибровки и в конце (продолжительность калибровки около 10 секунд).
Теперь вы можете использовать этот модуль лазерного дальномера.
Видеоинструкция
Ссылки:
1. Github — результаты реверс-инжиниринга и исходный код.
2. Habr.com — Гугл перевел статью о процессе реверс-инжиниринга лазерной рулетки.
Извините за мой английский — я из неанглоязычной страны.
Измерьте расстояние с помощью инфракрасного датчика приближения Sharp
Учебное пособие при необходимости
При поддержке DigitSpace
Используемые продукты: ИК-датчик приближения Sharp и 0.96-дюймовый OLED-дисплей 128 × 64 Синий / Желтый
Привет и добро пожаловать, это первый спонсируемый проект DigitSpace, он об измерении расстояния с помощью ИК-датчика приближения Sharp GP2Y0A02YK0F, измерения выполняются как в метрической, так и в британской системе, и мы » Я буду использовать OLED-экран, с ним можно сделать много возможностей: отображать измерения с разными единицами измерения в одно и то же время, переключаться между ними…
Датчик излучает лучи инфракрасного света, и они отражаются обратно на датчик.выход иногда может быть цифровым, как ИК-модуль FC 51, что означает, что на определенном расстоянии он будет давать вам ВЫСОКИЙ или НИЗКИЙ уровень, или как тот, который мы здесь используем, который имеет аналоговый выход: он дает вам значение напряжения в зависимости от от того, как далеко находится объект для обнаружения, но не забывайте, что это зависит от отражательной способности объекта и условий освещения.
Диапазон также может отличаться в зависимости от версии, у меня 20 см -> 120 см, поэтому лучше использовать свой и проверить его, чтобы узнать его пределы.
Модуль имеет 3 провода: Vcc, Gnd и данные или выход (аналоговый).
Тест 1Первый тест — это просто прямое подключение и измерение расстояния с отображением на серийный монитор.
ПодключениеПодключение 1 показано ниже.
БиблиотекаСуществуют разные библиотеки, но эта мне очень понравилась, вы можете скачать ее по ссылке прямо здесь.
Чтобы установить его, просто: Arduino IDE -> Sketch -> Включить библиотеку -> файл Add.ZIP и выберите библиотеку.
КодКод 1 можно найти ниже.
РезультатЗагрузите код и откройте последовательный монитор:
Проблема с датчикомПроблема с модулем заключается в том, что на расстояниях ниже 20 см он начинает выдавать странные значения (40 см 35 см…), которые не подходят для близких диапазон приложений.
ИЛИ Я ЕДИНСТВЕННЫЙ, У КОГО ЕСТЬ ЭТА ПРОБЛЕМА? Хорошо протестируйте и скажите мне.
Тест 2Тест 2, просто замените последовательный монитор на OLED-дисплей и добавьте кнопку для переключения между некоторыми единицами измерения (см-мм-дюйм).
ПодключениеПодключение 2 можно найти ниже
Для кнопки мне нравится использовать эту проводку, и в коде я активирую внутреннее подтягивание, кнопка всегда находится в ВЫСОКОМ состоянии, а когда я нажимаю, она переходит в НИЗКОЕ, вы можете использовать обычный метод, но вам нужно подключить к нему 5 В и добавить понижающий резистор, затем установить pinMode как вход только и в коде активировать состояние как HIGH level вместо LOW.
И, конечно, вы можете заменить OLED версией 128 × 32 или ЖК-дисплеем или чем угодно.
БиблиотекиВ дополнение к библиотеке датчиков, которая использовалась ранее: загрузите ее по ссылке прямо здесь, вы должны добавить библиотеки OLED Adafruit:
Загрузите здесь библиотеку Adafruit OLED SSD1306. Загрузите здесь Adafruit GFX Library.
КодКод 2 можно найти ниже.
РезультатНажмите кнопку для переключения между различными блоками
ДалееВы можете выполнить ручную калибровку модуля, если хотите, вы можете начать с измерения напряжения на разных расстояниях, и вы можете настроить напрямую из кода или библиотеки… обратите внимание на светоотражающие и круглые предметы.
Конечно, вы можете добавить желаемые единицы измерения или заменить их на желаемый дисплей.
Типы датчиков расстояния и как их выбрать?
Есть много типов датчиков расстояния; Ультразвук, ИК-приближение, лазерное расстояние и т. д., и выбор правильного для вашего следующего проекта Arduino или Raspberry Pi может оказаться сложной задачей. Поэтому сегодня мы рассмотрим множество датчиков расстояния, их типы и ответим, какой из них лучше всего подходит для вас!
Я расскажу следующее:
- Что такое датчики расстояния и как они работают?
- Типы датчиков расстояния
- Сравнение датчиков расстояния: Как выбрать датчик расстояния?
Что такое датчики расстояния?
Как следует из названия, для упрощения определения датчиков расстояния это датчики, используемые для определения близости объекта без какого-либо физического контакта.
Как работает датчик расстояния?Обычно связанный с ультразвуковыми датчиками, он функционирует путем вывода сигнала (в зависимости от технологии; ультразвуковые волны, ИК, светодиоды и т. Д.) И измерения изменений при возврате сигнала.
- Измерение изменения может быть в форме:
- Время, необходимое для возврата сигнала
- Интенсивность возвращенного сигнала
Поскольку датчики расстояния могут быть обычно связаны с датчиками приближения из-за аналогичной корреляции, функциональность любого датчика может быть легко неправильно понята.Поэтому вот краткое сравнение между ними, чтобы помочь вам понять, в чем разница между датчиками расстояния и датчиками приближения.
- Датчики приближения определяют, находится ли объект в зоне обнаружения, в которой датчик предназначен для работы. Следовательно, необязательно указывать расстояние между датчиком и объектом.
- Узнайте больше о датчиках приближения здесь!
- Датчики расстояния определяют расстояние от объекта и измерительного устройства путем выдачи тока.Токи могут быть в форме ультразвуковых, лазерных, инфракрасных волн и т. Д.
Типы датчиков расстояния
Теперь, когда у нас есть понимание того, что такое датчики расстояния, мы рассмотрим различные датчики измерения расстояния, представленные на рынке, каждый со своими собственными сенсорными технологиями.
Вот краткое изложение различных типов датчиков расстояния!
Ультразвуковой датчик Что такое ультразвуковой датчик?Пожалуй, наиболее распространенным типом датчика измерения расстояния является ультразвуковой датчик, также известный как датчик сонара, он определяет расстояние до объектов путем излучения высокочастотных ультразвуковых волн.
Принцип работы ультразвукового датчика- Ультразвуковой датчик излучает высокочастотные звуковые волны по направлению к целевому объекту
- Целевой объект улавливает звуковые волны
- Затем звуковые волны отражаются обратно в ультразвуковой датчик
- Время, необходимое звуковой волне, чтобы return используется как измерение расстояния между
Теперь, когда мы поняли, как это работает, мы посмотрим, для чего он используется.Вот общие области применения ультразвуковых датчиков расстояния:
- Измерение расстояния
- Роботизированные датчики
- Умные автомобили
- Да, Tesla использует ультразвуковые датчики в рамках своей программы автопилота!
- Беспилотные летательные аппараты (БПЛА)
Преимущества ультразвуковых датчиков
- Не зависит от цвета и прозрачности объекта, поскольку он определяет расстояние через звуковые волны
- Хорошо работает в темных местах
- Обычно потребляет меньший ток / мощность
- Несколько вариантов интерфейса для сопряжения с микроконтроллером и т. Д.
Недостатки ультразвуковых датчиков
- Ограниченный диапазон обнаружения
- Низкое разрешение и низкая частота обновления, что делает его непригодным для обнаружения быстро движущихся целей
- Невозможно измерить расстояние до объектов с экстремальной текстурой / поверхностью
Рекомендуемый ультразвуковой датчик
Grove — ультразвуковой датчик: Улучшенная версия HC-SR04Чтобы ультразвуковой датчик был похож на Arduino, вам понадобится модуль ультразвукового датчика.Я рекомендую Grove — ультразвуковой датчик, который обладает значительными преимуществами по сравнению с популярным HC-SR04!
Интересно, почему это лучший вариант, чем HC-SR04? Вот сравнительная таблица!
| Grove — Ультразвуковой датчик расстояния | HC-SR04 | |
|---|---|---|
| Рабочее напряжение | Совместимость с 3,3 В / 5 В Широкий уровень напряжения: 3,2 В — 5,2 В | 5V |
| Диапазон измерения | 3–350 см | 2–400 см |
| Необходимые контакты ввода / вывода | 3 | 4 |
| Рабочий ток | 8 мА | 15 мА |
| Размеры | 50 мм x 25 мм x 16 мм | 45 мм x 20 мм x 15 мм |
| Простота сопряжения с Raspberry Pi | Легко, прямое подключение к вводу / выводу Raspberry Pi | Требуется схема преобразования напряжения |
Из таблицы видно, что ультразвуковой датчик Grove — более универсальный вариант:
- Поддерживает более широкий уровень напряжения
- Требуется меньше контактов ввода / вывода
- Более простое сопряжение с Raspberry Pi
Хотите узнать больше? Вы можете ознакомиться со следующими ресурсами:
ИК-датчики расстояния
Второе место в этом списке занимают инфракрасные датчики расстояния, сокращенно инфракрасные.Чаще всего ассоциируется с Sharp GP2Y0A21YK0F, он определяет расстояние или приближение за счет излучения ИК-луча и вычисления угла отражения.
ИК-датчики поставляются с двумя линзами:
- Линза ИК-излучателя светодиода, излучающая световой луч
- Фотодетектор с чувствительностью к положению (PSD), где отраженный луч падает на
работают по принципу триангуляции; измерение расстояния на основе угла отраженного луча.
Вот иллюстрация того, как инфракрасные датчики расстояния работают через триангуляцию:
- Инфракрасный свет излучается ИК-излучателем светодиода
- Луч света попадает на объект (P1) и отражается под определенным углом
- Отраженный свет достигает PSD (U1)
- Датчик в PSD будет затем определите положение / расстояние до отражающего объекта
- Телевизоры, компьютеры, ноутбуки
- Измерение расстояния
- Системы безопасности, такие как видеонаблюдение, охранная сигнализация и т. Д.
- Приложения для мониторинга и управления
- Малый форм-фактор; Обычные ИК-датчики, такие как датчики Sharp, обычно меньше по размеру
- Применимы для использования в дневное и ночное время
- Защищенная связь по линии прямой видимости
- В отличие от ультразвуковых датчиков способна измерять расстояние до объектов со сложной поверхностью
- Ограниченный диапазон измерения
- Под влиянием условий окружающей среды и твердых предметов; невозможно использовать через стены или двери
Этот ИК-датчик приближения, основанный на SHARP gp2y0a21yk0f, является популярной рекомендацией для всех, кто ищет простое определение расстояния Arduino.
Этот инфракрасный датчик приближения, выполненный в компактном форм-факторе с низким энергопотреблением, обеспечивает непрерывное считывание расстояния в диапазоне от 10 см до 80 см!
Хотите узнать больше? Вы можете ознакомиться со следующими ресурсами:
ИК и ультразвуковойТеперь, когда мы разобрались как с инфракрасными, так и с ультразвуковыми датчиками, вам может быть интересно, в чем разница между инфракрасными и ультразвуковыми датчиками? Вот сравнительная таблица, демонстрирующая различия:
| ИК-датчик расстояния | Ультразвуковой датчик | |
|---|---|---|
| Что он делает | Измерение расстояния в отраженных световых волнах | Измерение расстояния по отраженным звуковым волнам |
| Как он измеряет | Триангуляция: измеряется угол отраженного ИК-луча | Регистрируется время между передачей и приемом звуковых волн |
| Человеческие отношения | Невидимый невооруженным глазом | Невыносимое |
| Требования к объекту | Подходит для измерения сложных объектов | Не подходит для измерения объектов со сложной поверхностью |
Лазерные датчики расстояния: датчики LIDAR
LiDAR, сокращенно от Light Detection and Ranging, можно рассматривать как лазерный датчик расстояния.Он измеряет дальность до цели с помощью световых волн лазера, а не радио или звуковых волн.
Принцип работы LIDARЕсть несколько способов объяснить, как работает LIDAR (например, триангуляция, база импульсов и т. Д.), Но самый простой способ:
ref- Передатчик на устройстве LiDAR излучает лазерный свет на целевой объект
- Затем импульс лазера улавливается целью и отражается обратно.
- Затем рассчитывается расстояние, используя соотношение между постоянной скоростью света в воздухе и время между отправкой / получением сигнала
Ключевые области применения LiDAR
- Экологический мониторинг; лесное хозяйство, картографирование и др.
- Измерение расстояния
- Управление машиной и безопасность
- Робототехника
Преимущества LiDAR
- Высокий диапазон измерения и точность
- Возможность измерения трехмерных структур
- Высокая частота обновления; подходит для быстро движущихся объектов
- Малые длины волн по сравнению с сонаром и радаром; хорошо обнаруживает мелкие объекты
- Подходит для использования днем и ночью
Недостатки LiDAR
- Более высокая стоимость по сравнению с ультразвуком и ИК.
- Вредно для невооруженного глаза; LiDAR-устройства более высокого уровня могут использовать более сильные LiDAR-импульсы, которые могут повлиять на человеческий глаз.
Не бойтесь высокой стоимости, которую приносит LiDAR, поскольку здесь, в Seeed, мы предлагаем миниатюрный датчик приближения LiDAR, который очень доступен по цене и легко сочетается с вашим Arduino!
Хотите узнать об этом больше? Вы можете перейти на страницу нашего продукта!
Светодиодные времяпролетные датчики расстояния
Наконец, мы рассмотрим светодиодные датчики времени пролета.Чаще всего ассоциируется с VL53L0X, это часть более широкого спектра LIDAR, который использует времяпролетную технологию для измерения расстояний.
Что такое времяпролетные датчики и принцип их работы ДатчикиTime-of-Flight — это датчики, которые измеряют время, необходимое волновому импульсу, чтобы отразиться от объекта и вернуться к датчику. Он способен создавать трехмерное изображение по осям X, Y, Z с помощью одного снимка, измеряя время, которое требуется свету, чтобы пройти от излучателя к приемнику.
Благодаря технологии времени пролета он обеспечивает значительные преимущества по сравнению с другими используемыми методами определения расстояния:
- Более широкий диапазон
- Более быстрые показания
- Более высокая точность
Датчики времени пролета работают аналогично датчикам LiDAR, где:
- Передатчик на времяпролетном устройстве излучает свет ИК-светодиода на целевой объект
- Затем импульс светодиода улавливается целью и отражается назад.
- Расстояние затем вычисляется с использованием отношения между константами скорость света в воздухе и время между отправкой / получением сигнала
Ключевые области применения времяпролетных датчиков:
- Промышленное применение
- Машинное зрение
- Робототехника
- Подсчет людей
- Дроны
Преимущества датчиков времени пролета:
- Такая технология обеспечивает высокий диапазон измерений с точностью.
- Возможность создания трехмерных изображений
- Используется в широком спектре приложений благодаря своей способности распознавать крупные объекты
Недостатки времяпролетных датчиков
- Более высокая стоимость
- Разрешение по глубине по оси Z все еще низкое с обычными системами, предлагающими разрешение по оси Z 1 см
Поддерживая свою популярность, VL53L0X объединяет передовой массив SPAD и включает запатентованную технологию ST FlightSense второго поколения.Это позволяет измерять абсолютные расстояния до 2 м!
Приведенная выше рекомендация также является частью нашей системы Grove, что упрощает сопряжение с вашим Arduino!
Хотите узнать об этом больше? Вы можете ознакомиться со следующими ресурсами:
Сравнение датчиков расстояния
Теперь, чтобы помочь вам выбрать подходящий датчик расстояния, я привел сводную таблицу ниже с тем, что вы должны учитывать при выборе.
Однако, поскольку у всех четырех из них есть свои плюсы и минусы, вам нужно сначала определить вашу предполагаемую цель / приложение, прежде чем выбирать одно!
| Ультразвуковые датчики | ИК-датчик | Датчики LiDAR | Время пролета | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Пригодность для обнаружения на большом расстоянии | Нет | Нет | Да | Да | Да | Да | Высокая частота | Нет | Нет | Да | Да |
| Стоимость | Низкая | Низкая | Высокая | Умеренная | |||||||
| Пригодность для использования для сложных объектов | Нет Да | Нет Да | |||||||||
| Чувствительность к внешним условиям | Да | Нет | Нет | Нет | |||||||
| Совместимость с 3D-изображениями | Нет | Нет | Да | Да |